Der mangler hænder i bygge- og anlægsbranchen. Samtidig er der fokus på, hvordan arbejdsmiljøet kan forbedres for de mange håndværkere, der udsættes for tunge løft og slidsomme arbejdsstillinger.
Et muligt svar på begge dele kan være byggerobotter, og på netop det område har Teknologisk Institut givet sig i kast med et projekt, der vil få de fleste til at spærre øjnene op.
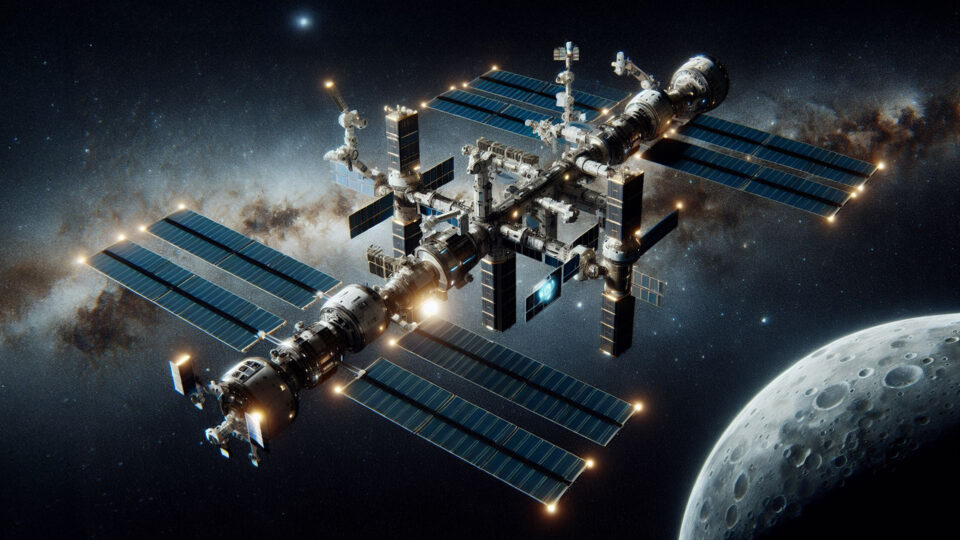
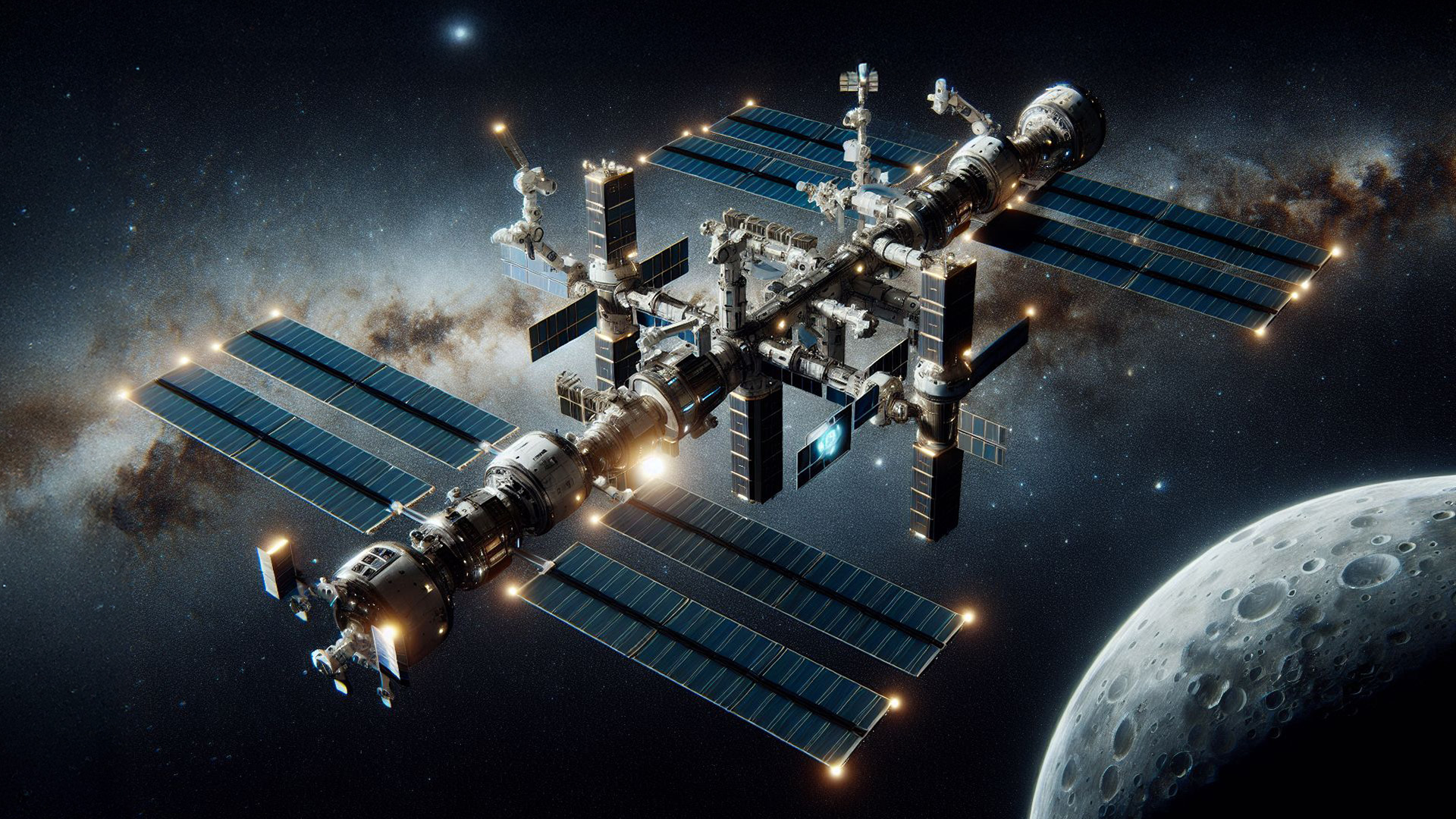
Teknologisk Institut skal nemlig hjælpe European Space Agency (ESA) med at udvikle robotteknologi til byggeri, vedligeholdelse og nedtagning af store konstruktioner i rummet – f.eks. rumstationer og solcelleanlæg.
Odense vinder værtskab for konference om robotteknologi i byggeriet
Nærmere bestemt skal Teknologisk Institut med projektet ’SpaceAlign’ udvikle og teste nye software- og styringsløsninger, der skal bane vej for, at robotter kan udføre disse opgaver automatisk og selvstændigt.
‒ ESA har bedt os om at undersøge, hvordan vi kan få robotter til at blive pålidelige og tilpasningsdygtige partnere i hele livscyklussen for store rumkonstruktioner ‒ fra opbygning og vedligeholdelse til nedtagning og genbrug ‒ med minimal menneskelig indgriben og maksimal autonomi, siger Mikkel Labori, som er faglig leder hos Teknologisk Institut.
Autonome robotter
Hidtil har rumrobotter været afhængige af forprogrammerede instruktioner, da kommunikationsforsinkelser og den store afstand gør direkte menneskelig kontrol vanskelig.
Men nu skal robotterne altså blive bedre til at tage egne beslutninger i uforudsete situationer.

Robot gør klar til at indtage stilladsbranchen
Teknologisk Institut vil i samarbejde med ESA og centrale europæiske rumaktører derfor udvikle en avanceret simuleringsplatform, hvor sikkerheds- og pålidelighedstjek kan testes.
‒ Vi skal udvikle og demonstrere en software- og simuleringsløsning, der gør autonome robotter i stand til at tilpasse sig og agere sikkert ved konstruktion, vedligehold og demontering af store rumkonstruktioner – med særligt fokus på sikkerhed og robusthed mod uforudsete hændelser, forklarer Christian Skov Esbensen, der er konsulent hos Teknologisk Institut.
Sender robotterne på træningslejr
Projektet kombinerer to teknologisk krævende områder: autonom robotteknologi og rummet som miljø.
Støv, stråling og sensorfejl er eksempler på, hvad der kan ramme robotterne – og det skal de i fremtiden kunne håndtere og kompensere for. Én af metoderne til at opnå det er ved at sende robotterne på “træningslejr”.

BIG på biennalen: Mikser robotteknologi med bhutanesisk håndværk
‒ En vigtig del af projektet bliver at skabe en realistisk simulering, hvor man kan afprøve, hvordan robotten tilpasser sig nye situationer. På den måde bliver simuleringen en slags træningslejr, hvor robotten og dens systemer kan lære at håndtere rummet, uden at det koster dyrt at fejle, siger Christian Skov Esbensen.
’SpaceAlign’-projektet løber frem til april 2026. Projektets resultater – herunder simuleringsplatform og rapporter – bliver gjort åbent tilgængelige.